数值结构之图 Graph
I. 图
1. 图的定义
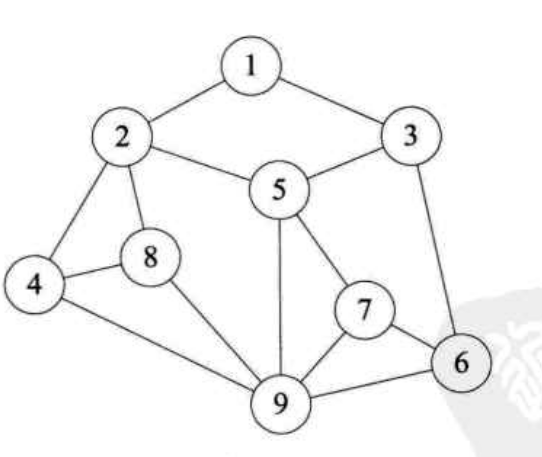
图 Graph : 是由顶点的有穷非空集合和顶点之间边的集合组成,通常表示成 G(V, E), 其中 G 表示一个图,V 是图中顶点的集合,E 是图 G 中边的集合
注意:
线性表中我们把数据元素叫做元素;树中将数据元素叫做结点; 在图中数据元素我们称之为顶点vertex线性表可以有空表;树可以有空树; 但是图中不允许没有顶点线性表中,相邻的元素之间具有线性关系;树中,相邻两层的结点具有层次关系; 在图中,任意两个顶点之间都可能有关系,顶点之间的逻辑关系用边来表示,边集可以是空的
2. 一些概念
无向边:- 若顶点 Vi 到 Vj 之间的边没有方向,则称这条边为无向边 (
Edge) - 用无序偶对(Vi, Vj)来表示
- 如果图中任意两个顶点之间的边都是无向边,那么称该图为
无向图 Undirected graphs
- 若顶点 Vi 到 Vj 之间的边没有方向,则称这条边为无向边 (
无向完全图- 在无向图中,如果任意两个顶点之间都存在边,那么该图为
无向完全图 - 含有 n 个顶点的无线完全图有
n*(n-1)/2条边
- 在无向图中,如果任意两个顶点之间都存在边,那么该图为
有向边:- 若从顶点 Vi 到 Vj 之间的边有方向,则称这条边为有向边,也叫弧(
Arc) - 用有序偶对 <Vi, Vj> 来表示, Vi称为弧尾 tail, Vj 称为弧头 head
- 如果图中任意两个顶点之间的边都是有向边,那么称该图为
有向图 Directed graphs
- 若从顶点 Vi 到 Vj 之间的边有方向,则称这条边为有向边,也叫弧(
有向完全图:- 如果任意两个顶点之间都存在方向互为相反的两条弧,称之为
有向完全图
- 如果任意两个顶点之间都存在方向互为相反的两条弧,称之为
简单图:- 在图中,若不存在顶点到其自身的边,且同一条边不重复出现,称这样的图为简单图
权:- 有些图的边和弧具有与它相关的数字,这种与图的边和弧相关的数叫做权(weight)
- 权可以表示从一个顶点到另一个顶点的距离或者耗费
网:- 带权的图称为网
3. 图的顶点与边的关系
- 无向图:
度 Degree: 顶点 V 的度是和 V 相关联的边的数目,记为 TD(V)
- 有向图:
入度 InDegree: 以顶点 V 为头的弧的数目,记为 ID(V)出度 OutDegree: 以顶点 V 为尾的弧的数目,记为 OD(V)- 顶点 V 的度: TD(v) = ID(v) + OD(v)
4. 连通图
路径 path:从一个顶点到另外一个顶点的边的集合连通图 Connected Graph:- 在无向图 G 中,如果从顶点 V 到顶点 V’ 有路经,则 V 和 V’ 是连通的
- 如果图中任意两个顶点 Vi, Vj 都是连通的,则 G 是连通图
- 对于有向图,则成为
强连通图
连通分量:无向图中极大连通子图称为连通分量- 要是子图
- 子图要连通
- 连通子图含有极大顶点数
- 具有极大顶点数的连通子图包含依附于这些顶点的所有边
II. 图的实现
1. 图的抽象数据类型
ADT Graph
Data
顶点的有穷非空集合和边的集合
Operation
CreateGraph(*G, V, VR) // 构造图
DestroyGraph(*G) // 如果图存在则销毁
LocateVex(G, u) // 若 G 中存在顶点 u, 则返回图中的位置
GetVex(G, v) // 返回图中顶点 v 的值
PutVex(G, v, value) // 将图 G 中顶点 v 赋值 value
FirstAdjVex(G, *v) // 返回顶点 v 的一个邻接顶点,若顶点在 G 中无邻接顶点则返回空
NextAdjVex(G, v, *w) // 返回顶点 v 相对于顶点 w 的下一个邻接顶点,若 w 是 v 的最后一个邻接点则返回空
DeleteVex(*G, v) // 删除图G中顶点 v 及其相关的弧
InsertArc(*G, v, w) // 在图中增加弧 <v,w>
DeleteArc(*G, v, w) // 在图中删除弧 <v,w>
DFSTraverse(G) // 深度优先遍历
HFSTraverse(G) // 广度优先遍历
2. 图的邻接矩阵
因为图是由顶点和边或弧两部分组成,所以用两个结构来分别存储:
- 顶点:用一维数组
- 边或弧: 用一个二维数组存点和点之间的关系
图的邻接矩阵 Adjacency Matrix 存储方式是用两个数组来表示图,一个一维数组来存储图中的顶点信息,一个二维数组(称为邻接矩阵)来存储图中边或弧的信息
设图 G 中有 n 个顶点,则邻接矩阵是一个 n*n 的方阵,定义为 arc[i][j], 下图是一个无向图的邻接矩阵
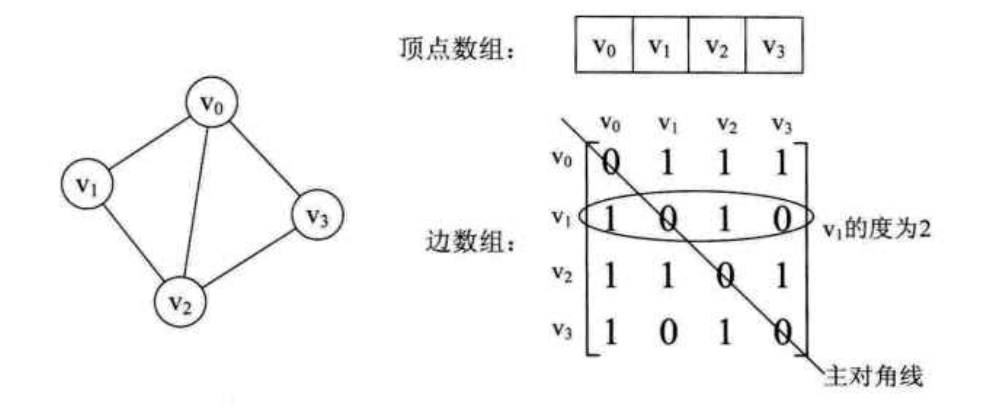
可以发现,无向图的边数组是一个对称矩阵
有了这个邻接矩阵,我们可以很容易的知道图中的信息:
- 判断任意两个顶点是否有边或者无边(看矩阵是否对称)
- 我们要知道某个顶点的度,其实就是这个顶点 Vi 在邻接矩阵中第 i 行(或者第 i 列)的元素之和,比如 v1 的度就是 1+0+1+0 = 2
- 求顶点 vi 的所有邻接点就是将矩阵中第 i 行元素扫描一遍,arc[i][j] 为 1 就是邻接点
再来看一个有向图的邻接矩阵:
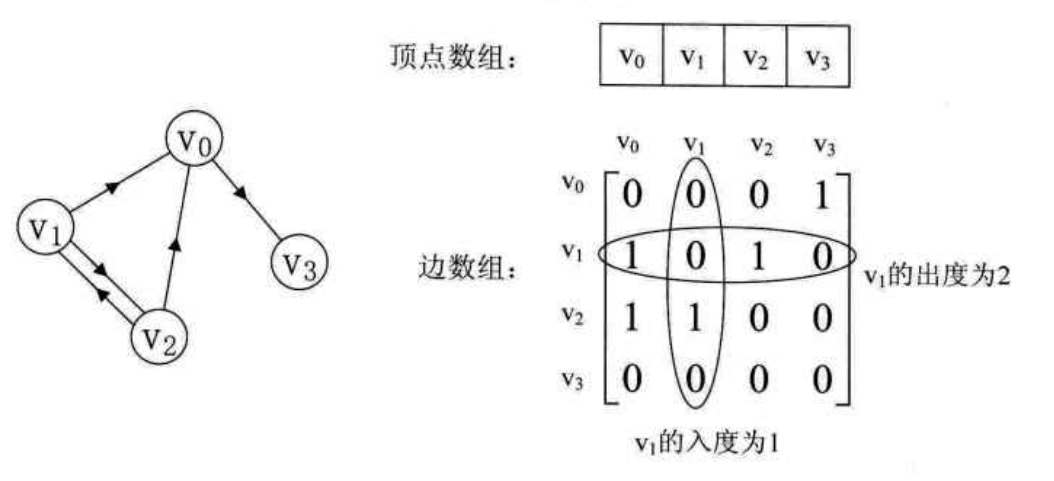
有向图的矩阵不对称,矩阵的行是出度,列是入度
3. 无向图存储结构的定义
package org.lovian.datastructure.graph;
import org.lovian.datastructure.data.DataType;
import org.lovian.datastructure.data.IntDataType;
import org.lovian.datastructure.data.IntWeightType;
import org.lovian.datastructure.data.WeightType;
public class UndirectedGraph {
private static final int INFINITY = 65535; // 用 65535 来代表无穷
private DataType[] vexs; // 存储顶点的一维数组
private WeightType[][] arc; // 邻接矩阵
private int numVertexes; // 图中当前顶点数
private int numEdges; // 图中当前边数
public UndirectedGraph(int maxVex) {
// 最大的顶点数
this.vexs = new IntDataType[maxVex];
this.arc = new IntWeightType[maxVex][maxVex];
}
}
4. 无向图其他操作
初始化无向图
public void initGraph(int numVertexes, int numEdges) {
// 设置要生成图的顶点数和边数
this.numVertexes = numVertexes;
this.numEdges = numEdges;
// 初始化邻接矩阵全部为无穷
for (int i = 0; i < this.numVertexes; ++i) {
for (int j = 0; j < this.numVertexes; ++j) {
WeightType weight = new IntWeightType();
weight.SetWeight(INFINITY);
arc[i][j] = weight;
}
}
// 读入 numEdges 条边,建立邻接矩阵
Scanner sc = new Scanner(System.in);
for (int k = 0; k < this.numEdges; ++k) {
System.out.println("输入边 (Vi, Vj) 的下标 i:");
int i = sc.nextInt();
System.out.println("输入边 (Vi, Vj) 的下标 j:");
int j = sc.nextInt();
System.out.println("输入边 (Vi, Vj) 的权 w:");
int w = sc.nextInt();
arc[i][j].SetWeight(w);
}
sc.close();
}
时间复杂度 O(n^2)
5. 邻接表
邻接矩阵是一种比较不错的存储结构,但是,对于边数相对顶点较少的图,这种结构是存在对存储控件的极大浪费。所以我们考虑另外一种存储结构,用数组和链表相结合的存储方法称为邻接表 Adjacency Lsit:
- 图中的顶点用一个一维数组存储,当然,顶点也可以用单链表存储,但是数组更方便
- 图中每个顶点 vi 的所有邻接点构成一个线性表,由于邻接点的个数不定,所以用单链表存储,无向图称为顶点 vi 的边表,有向图则称为 vi 作为弧尾的出边表
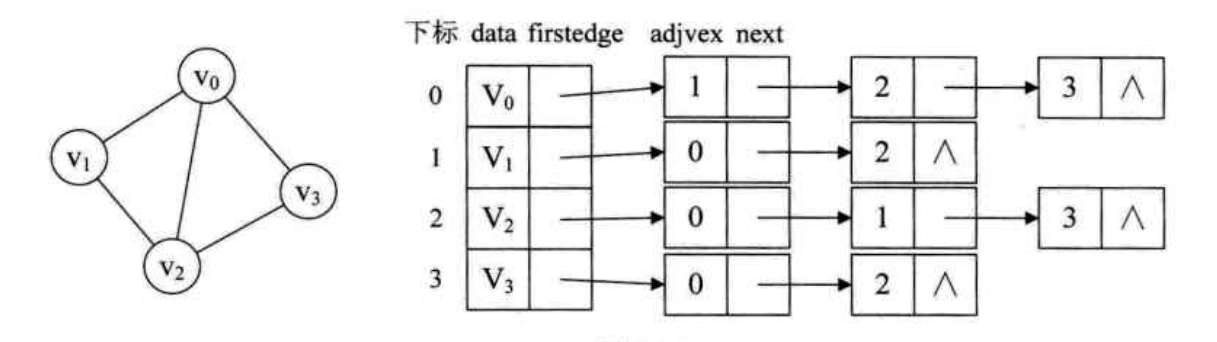
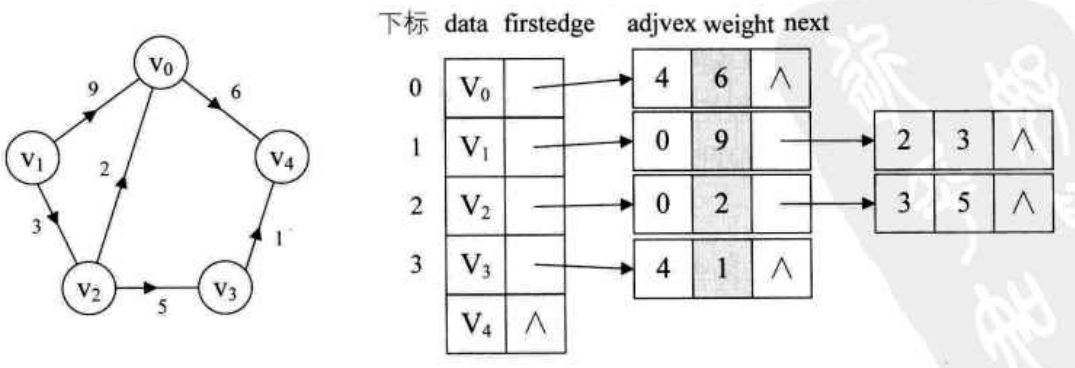
从图中我们可以看出:
顶点表的各个节点由 data 和 firstedge 两个域表示- data 是数据域,存储顶点信息
- firstedge 是指针域,指向边表的第一个结点,即此顶点的第一个邻接点
边表结点由 adjvex 和 next 两个域组成- adjvex 是邻接点域,存储某顶点的邻接点在顶点表中的下标
- next 存储指向边表中下一个结点的指针
- 比如 v1 顶点与 v0、 v2互为邻接点,则在 v1 的边表中,adjvex 分别为 v0 的 0 和 v2 的 2
这样的结构我们要获得图中相关信息也很容易:
- 获取某个顶点的度: 查找这个顶点边表中结点的个数
- 判断两个顶点之间是否存在边: 测试顶点 vi 的边表中 adjvex 是否存在结点 vj 的下标 j
- 求顶点的所有邻接点,那么就是对此顶点的边表进行遍历,得到 adjvex 域对应的邻接点
对于待权值的网图,可以在边表结点定义中增加一个 weigth 数据域,存储权信息; 另外由于有向图有方向,用顶点为弧尾来存储边表的额,这样很容易得到每个顶点的出度,图示如下:
如果用顶点的弧头来建立边表,那么这就是一个逆向邻接表
6. 十字链表
由于邻接表在处理有向图时,只能得到某个顶点的出度,要得到入度的话,需要对整个图进行遍历,所以要同时方便的得到出度和入度信息,就要结合邻接表和逆向邻接表,这就是十字链表 Orthogonal List。
顶点表结点结构:data: 存储顶点数据firstin:入边表头指针,指向该顶点的入边表中的第一个结点firstout:出边表头指针,指向该顶点出边表中的第一个结点
边表结点结构:tailvex: 弧起点在顶点表的下标headvex: 弧终点在顶点表的下标headlink:入边表指针域,指向终点相同的下一条边taillink:出边表指针域,指向起点相同的下一条边weigth: 权值
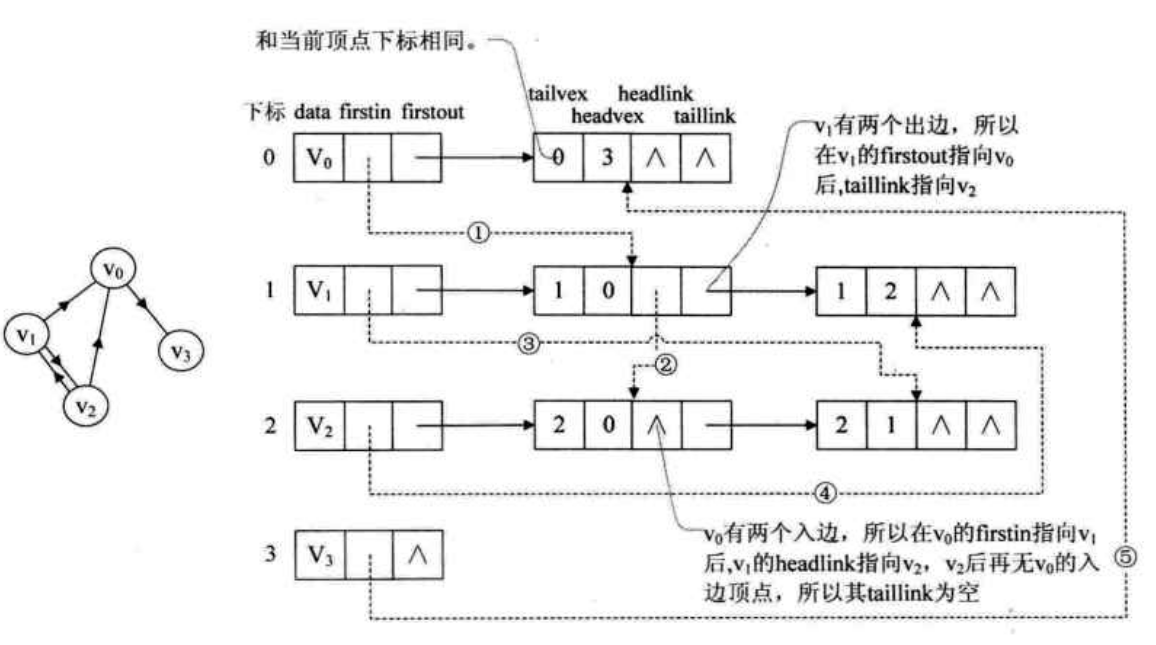
在图中,虚线箭头其实就是此图的逆邻接表的表示,对于 v0 来说, 它有两个顶点 v1 和 v2 的入边, 因此 v0 的firstin 指向顶点 v1 的边表结点中 headvex 为 0 的结点,接着由入边结点的 headlink 指向下一个入边顶点 v2。对于顶点 v1, 它有一个入边顶点 v2, 所以它的 firstin 指向顶点 v2 的边表结点中 headvex 为 1 的结点。顶点 v2 和 v3 也是同样有一个入边顶点
III. 图的遍历
图的遍历和树的遍历类似,从图中某一个顶点出发遍历图中其余顶点,且使每一个顶点仅被访问一次。
在树的遍历中有四种方法,但是树的根结点只有一个,遍历都是从根结点开始。但是在图中,因为它的任何一个顶点都可能和其余的所有顶点相邻接,极有可能沿着某条路经搜索之后,又回到了原顶点,而有些顶点却还没有遍历到。所以我们要在遍历的过程中,把访问过的顶点打上标记。具体办法是,设置一个访问数组 visted[n], n 是图中顶点的个数,初值为 0,访问过后设置为 1。遍历的方式有两种:深度优先遍历和广度优先遍历。
1. 深度优先遍历
深度优先遍历 Depth First Search, 也叫深度优先搜索 (DFS)。
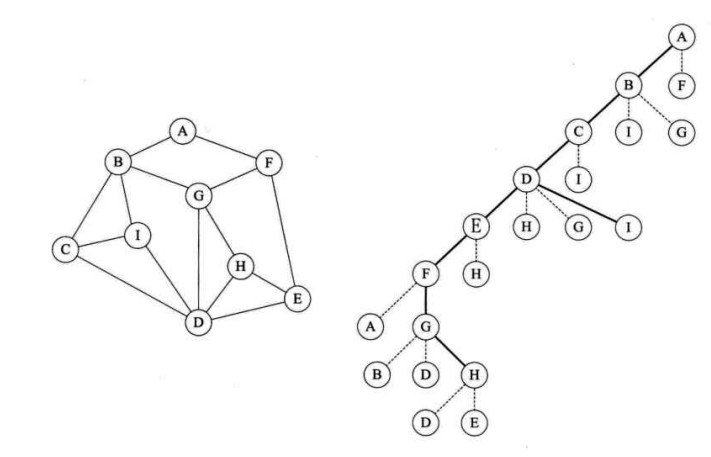
深度优先遍历实际上就是一个递归的过程,有点类似树的前序遍历: 从图中某个顶点 v 出发, 访问此顶点,然后从 v 的未被访问的邻接点出发深度优先遍历图,直到图中所有和 v 有路径相通的顶点都被访问到
我们用代码来实现下图的遍历:
C++代码实现:(邻接矩阵)
typedef char VertexType; /* 顶点类型应由用户定义 */
typedef int EdgeType; /* 边上的权值类型应由用户定义 */
#define MAXSIZE 9 /* 存储空间初始分配量 */
#define MAXEDGE 15
#define MAXVEX 9
typedef struct
{
VertexType vexs[MAXVEX]; /* 顶点表 */
EdgeType arc[MAXVEX][MAXVEX];/* 邻接矩阵,可看作边表 */
int numVertexes, numEdges; /* 图中当前的顶点数和边数 */
} MGraph;
bool visited[MAXVEX];/* 访问标志的数组 */
/* 邻接矩阵的深度优先递归算法 */
void DFS(MGraph MG, int i)
{
int j;
visited[i] = true;
cout << MG.vexs[i] << ' '; /* 打印顶点,也可以其它操作 */
for (j = 0; j < MG.numVertexes; j++)
if (MG.arc[i][j] == 1 && !visited[j])
DFS(MG, j);/* 对为访问的邻接顶点递归调用 */
}
/* 邻接矩阵的深度遍历操作 */
void DFSTraverse(MGraph MG)
{
int i;
for (i = 0; i < MG.numVertexes; i++)
visited[i] = false;/* 初始所有顶点状态都是未访问过状态 */
for (i = 0; i < MG.numVertexes; i++)
if (!visited[i])
DFS(MG, i);/* 对未访问过的顶点调用DFS,若是连通图,只会执行一次*/
}
遍历顺序: A B C D E F G H I
2. 广度优先遍历
广度优先遍历 Breadth First Search, 也叫广度优先搜索 (BFS)
广度优先遍历类似于树的层序遍历,如下图:
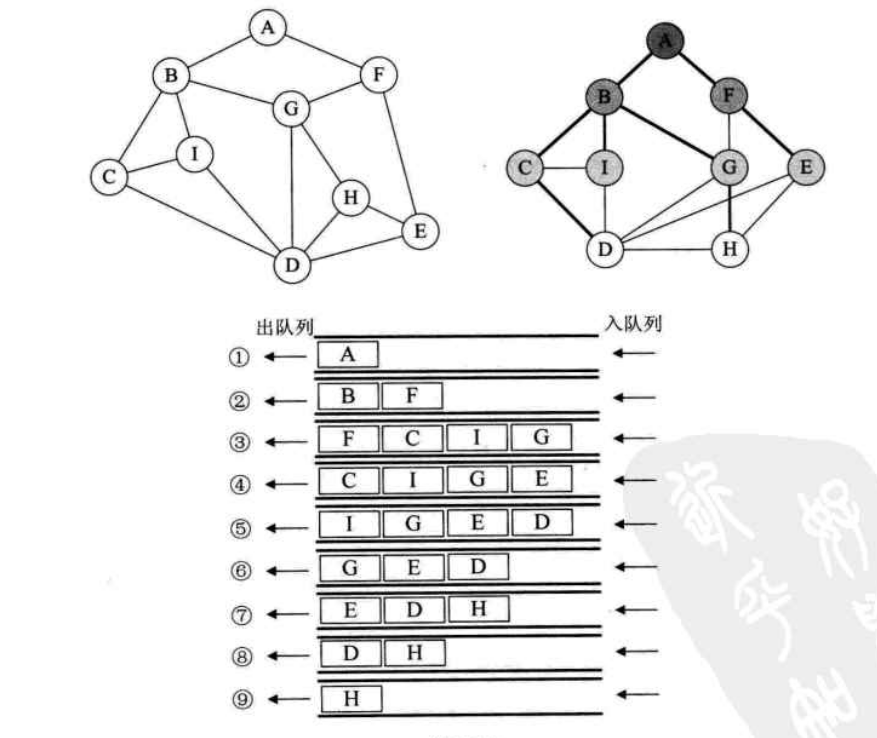
我们把图的顶点,根据其邻接点来进行分层变形,但实际上顶点和边的关系没有发生变化。然后对每一层的顶点进行遍历,
C++代码如下:(邻接矩阵)
typedef char VertexType; /* 顶点类型应由用户定义 */
typedef int EdgeType; /* 边上的权值类型应由用户定义 */
#define MAXSIZE 9 /* 存储空间初始分配量 */
#define MAXEDGE 15
#define MAXVEX 9
typedef struct
{
VertexType vexs[MAXVEX]; /* 顶点表 */
EdgeType arc[MAXVEX][MAXVEX];/* 邻接矩阵,可看作边表 */
int numVertexes, numEdges; /* 图中当前的顶点数和边数 */
} MGraph;
/* 邻接矩阵的广度遍历算法 */
void BFSTraverse(MGraph G)
{
int i, j;
Queue Q;
for (i = 0; i < G.numVertexes; i++)
visited[i] = false;
InitQueue(&Q);/* 初始化一辅助用的队列 */
for (i = 0; i < G.numVertexes; i++)/* 对每一个顶点做循环 */
{
if (!visited[i])/* 若是未访问过就处理 */
{
visited[i] = true;/* 设置当前顶点访问过 */
cout << G.vexs[i] << ' '; /* 打印顶点,也可以其它操作 */
EnQueue(&Q, i);/* 将此顶点入队列 */
while (!QueueEmpty(Q))/* 若当前队列不为空 */
{
DeQueue(&Q, &i);/* 将队对元素出队列,赋值给i */
for (j = 0 ; j < G.numVertexes; j++)
{
/* 判断其它顶点若与当前顶点存在边且未访问过 */
if (G.arc[i][j] == 1 && !visited[j])
{
visited[j] = true;/* 将找到的此顶点标记为已访问 */
cout << G.vexs[j] << ' '; /* 打印顶点 */
EnQueue(&Q, j);/* 将找到的此顶点入队列 */
}
}
}
}
}
}
遍历结果为:A B F C G I E D H
3. 深度优先和广度优先的另一种理解
广度优先遍历 BFS:
- 浅尝辄止,每个顶点只访问邻接结点(如果邻接结点没有被访问过),并且记录这个邻接结点,当访问完它的邻接结点之后就结束这个顶点的访问。
- BFS 用到了 FIFO 队列,通过这个队列来存储第一次发现的结点,对于再次发现的结点,不放入队列
Function BFS(G = (V,E): graph; s: vertex of G) : List of vertices
// G is a connected graph of order n
// Vertices of G are labeled from 1 to n
// s is a vertex of G
// Return a list (a queue) of all vertices, ordered by the order of visit
VARIABLES
Visited : Queue
// Visited is the list of visited vertices
Q : Queue
BEGIN
Visited ← enqueue(s,emptyQueue)
Q ← enqueue(s,emptyQueue)
WHILE Q is not empty DO
i ← dequeue(Q)
FOR ALL edge {i,j} in E DO
IF j is not in Visited THEN
enqueue(j,Visited)
enqueue(j,Q)
END IF
END FOR
END WHILE
RETURN Visited
END
深度优先遍历 DFS:
- 打破砂锅问到底,访问一个顶点后,继而访问下一个邻接的顶点,如此往复直到当前顶点被访问或者它不存在邻接的顶点
- DFS 可以理解为用到了 Stack 的策略(递归调用)
IV. 最小生成树
一个连通图的生成树,是一个极小的连通子图,它含有图中所有的顶点,但只有足以构成一棵树的 n-1 条边,我们把构造连通网的最小代价生成树称为最小生成树 Minumum Cost Spanning Tree。其实,就是带权图对应的生成树, 生成树各边的权值总和称为生成树的权。权最小的生树称为最小生成树。比如规划最小成本架设电线塔。
找连通网的最小生成树有两种算法: Prim 算法和 Kruskal 算法
1. Prim 算法
Prim 算法从点入手,不断扩大点集合,并在以点集合中所有点相关的边中权值最小的且不构成回路的,不断加入集合,最终构成最小生成树。
对于图G=(V,E),Prim算法描述如下:
1、给定空集合A,以及任何一点v0属于{V},将v0加入集合A中,此时A={v0}。
2、对于集合A中的任意一点u,以及V-A中任意一点w,找到权重最小的边(u,w)
3、判断步骤2中的边(u,w)是否使图A形成回路,如果形成回路,则不加入A,否则将点w和边(u,w)加入A。
4、判断此时图G中所有点{V}是否已经全部加入到集合A中,如果是,则最小生成树已经找到,返回 A;否则,继续步骤2。
伪代码如下
Function Prim(G=(V,E,W):graph): graph
% Precondition: G connected
BEGIN
Chose (randomly) a vertex v from V(G)
T ← ({v},{})
WHILE V(T) ⊊ V(G) DO
Chose e = {v,v’} such that
v ∈ V(T) and v’ ∉ V(T) and W(e) minimal
T ← T + e
END WHILE
Return T
END
2. Kurskal 算法
Prim 算法是以某个顶点为起点,逐步找各个顶点上最小权值的边来构建最小生成树的。同样的思路,我们可以直接以边为目标去构建,因为权值是在边上,所以直接去找最小权值的边来构成生成树。
对于图G=(V,E),Kruskal算法描述如下:
| 1、构造空集合A,并将图G中所有点加入集合A,此时A为有 | V | 棵树的森林。 |
2、将图G中所有边按照权重进行排序,形成有序集合B。
3、对于步骤2中排序后集合B中权重最小的边(u,v),尝试将(u,v)以及点u、v加入到集合A中。
4、如果步骤3中尝试加入的点和边,对于图A而言,不形成回路,则添加点u、v及边(u,v),否则不添加。
5、将步骤3处理的边(u,v)从集合B中删除。
| 6、判断此时作为图的集合A,是否满足边的数量等于 | V | -1(也即满足最小生成树的要求),如果是,则找到最小生成树,如果不是,则转至步骤3。 |
伪代码如下:
FUNCTION Kruskal(G=(V,E): graph): graph
G weighted connected graph
result: A MST
BEGIN
F = E
T = a set of edges
Initialize T to empty
WHILE |T|<n-1 DO
Find an minimum weighted edge e of F
F := F - e
IF T + e is acyclic THEN
T := T + e
END IF
END WHILE
Return (V,T)
END
V.最短路径
最短路径: 是指两顶点之间经过的边上权值之和最少的路径,路径上的第一个顶点是源点,最后一个顶点是终点。
最短路径典型应用场景就是规划地铁路线
1. Dijkstra 算法
Dijkstra 算法是单源图最短路算法:
- 输入
- 连通有权图
- 起点 s
所有边权非负
- 输出
- 起点到各个结点的最短路长度
思路:
1、初始时,S只包含源点,即S={v},v的距离dist[v]为0。U包含除v外的其他顶点,U中顶点u距离dis[u]为边上的权值(若v与u有边) )或∞(若u不是v的出边邻接点即没有边<v,u>)
2、从U中选取一个距离v(dist[k])最小的顶点k,把k,加入S中(该选定的距离就是v到k的最短路径长度)
3、以k为新考虑的中间点,修改U中各顶点的距离;若从源点v到顶点u(u∈ U)的距离(经过顶点k)比原来距离(不经过顶点k)短,则修改顶点u的距离值,修改后的距离值的顶点k的距离加上边上的权。即如果dist[k]+w[k,u]<dist[u],那么把dist[u]更新成更短的距离dist[k]+w[k,u]
4、重复步骤(2)和(3)直到所有顶点都包含在S中(要循环n-1次)
伪代码如下:
Function Dijkstra(G = (V,E,W): graph; s: vertex of G): Tree
// G is of order n, connected and with positive weights
// Return a tree of shortest path from s to all other vertices
VARIABLES
d: table [1..n]
// d(i) is the distance from s to i
father : table [1..n]
// father(i) is the predecessor of i in a shortest path from s to i
1M: set of vertices with a known shortest distance from s
E’: set of edges of the return tree
BEGIN
FOR i FROM 1 TO n DO
d(i) := +∞
END FOR
d(s) := 0
M := {}
WHILE M 6 = V DO
Chose i in V - M with minimum d(i)
M := M + i
FOR ALL j successor of i DO
IF d(i) + W(i,j) < d(j) THEN
d(j) := d(i) + W(i,j)
father(j) := i
END IF
END FOR
END WHILE
// Construction of the tree
E’ :=
FOR i FROM 1 TO n, i 6 = s DO
E’ := E’ + (father(i),i)
END FOR
Return (V,E’)
END
Share this on